[TIDA-010003] 시스템 개요
출처: http://www.ti.com/tool/TIDA-010003
TIDA-010003 시스템은 TIDA-01547 시스템과 달리,
CC1310 보드 하나로 end node를 구성한다.
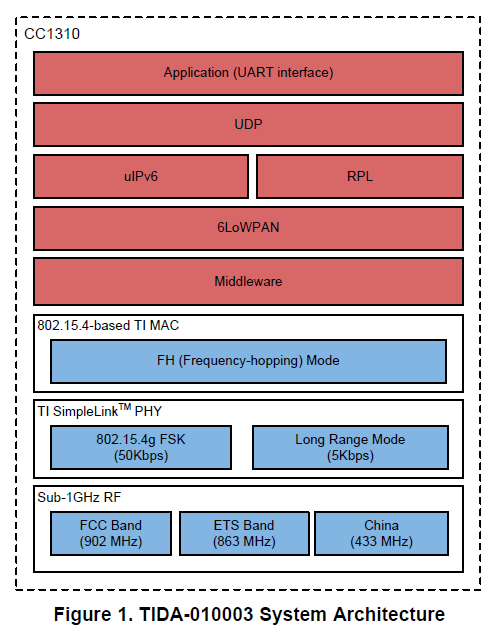
그래서 system architecture는 다음과 같다.
CC1310 보드 하나로 end node를 구성한다.
그래서 system architecture는 다음과 같다.
위를 보면 MSP432가 맡았던 layer들까지 CC1310에서 맡는다. (이게 어떻게 가능할까 아직 이해가 안 된다.)
그래서인지 System 스펙이 두 보드를 사용했을 때 보다는 낮다.
최대 application data size라던지, 최대 neighbor node의 개수라던지
그리고 CC1310을 CC1350으로 대체해도 된다고 한다.
해당 system은 6LoWPAN mesh networking with FH MAC over sub-1GHz RF이다.
6LoWPAN mesh network stack은 TI-RTOS에서 돌아가고,
TI-RTOS는 CONTIKI open source를 기반으로 구현되었다.
state는 INIT > FH SYNC > PA done > JOINED > Complete RPL-level Joining Process로 이뤄지며
state machine의 바뀌는 과정은 /Application/middleware.c에 구현되어 있다고 한다.
(TIDA-01547과 코딩 로직이 약간 달라진 것 같다)
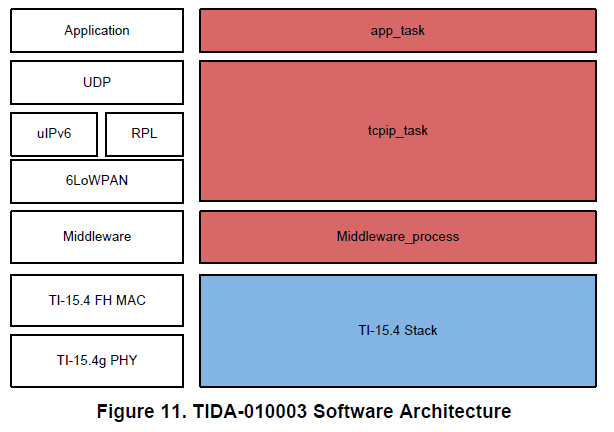
TIDA-010003의 software architecture는 다음과 같다.
그래서인지 System 스펙이 두 보드를 사용했을 때 보다는 낮다.
최대 application data size라던지, 최대 neighbor node의 개수라던지
그리고 CC1310을 CC1350으로 대체해도 된다고 한다.
해당 system은 6LoWPAN mesh networking with FH MAC over sub-1GHz RF이다.
6LoWPAN mesh network stack은 TI-RTOS에서 돌아가고,
TI-RTOS는 CONTIKI open source를 기반으로 구현되었다.
state는 INIT > FH SYNC > PA done > JOINED > Complete RPL-level Joining Process로 이뤄지며
state machine의 바뀌는 과정은 /Application/middleware.c에 구현되어 있다고 한다.
(TIDA-01547과 코딩 로직이 약간 달라진 것 같다)
TIDA-010003의 software architecture는 다음과 같다.
TIDA-01547과 비교해보면, TI-15.4 stack과 UART로 통신해 host rx task, host tx task를 진행했던 것과 달리,
TIDA-010003에서는 Middleware process를 통해 FH sync, keep alive mechanism, 그리고
TI-15.4 stack과 mesh network stack간의 interface 역할을 한다.
LED configuration은 다음과 같다.
Data의 송신, 수신이 일어날 때 Red LED가 toggle 되고,
Complete RPL-level Joining이 되었을 때 Green LED가 켜진다.
TIDA-010003에서는 Middleware process를 통해 FH sync, keep alive mechanism, 그리고
TI-15.4 stack과 mesh network stack간의 interface 역할을 한다.
LED configuration은 다음과 같다.
Data의 송신, 수신이 일어날 때 Red LED가 toggle 되고,
Complete RPL-level Joining이 되었을 때 Green LED가 켜진다.


댓글
댓글 쓰기